
用于太空和深海探测的自主机器人
月上之人
在德国不来梅,弗兰克·克辛那教授的团队致力于研究在太空和水下作业的机器人。在远离地球的外太空,机器人必须能够自行定位并做出决定——就像街道中的自动驾驶汽车一般。
月球在不来梅有一个分支机构。人造陨石坑的斜面足有 9 米宽,从坑底到顶部需要跨越 5.5 米的高度距离。想要从底部爬上去的人,必须克服温度从 25 度升至 40 度的变化。但人们通常只是观众,因为月球景观的作用是为性格坚毅的宇航员提供训练场:在德国人工智能研究中心(DFKI)的太空探索大厅,机器人会练习如何对地球卫星进行独立探测。挑选这一场地进行试验并不是没来由的:陨石坑及其周围环境是卫星和行星上最有趣的地方之一,因为它们的斜坡包含来自不同时期的沉积层以及来自太阳系的材料痕迹。此外,陨石坑的岩块能够提供许多有关卫星和行星形成的信息。
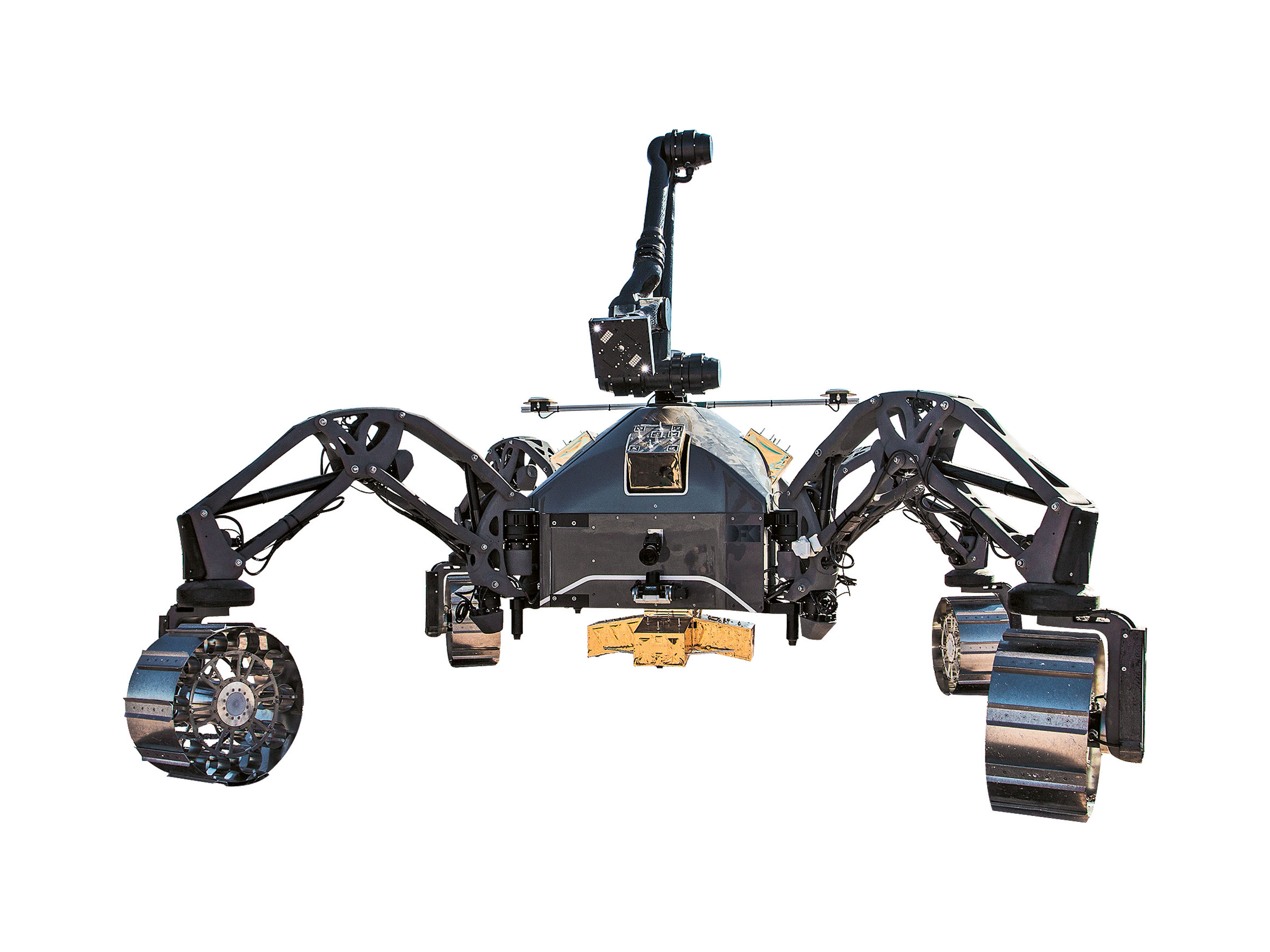
攀爬机器人的发明者是弗兰克·克辛那教授(Frank Kirchner),他是位于不来梅郊区的 DFKI机器人创新中心的负责人,并与团队一起致力于研究机器宇航员。克辛那教授在创造机器人时经常受到生物学原型的启发,例如四足跑步机器人“查理”(Charlie),它看起来像一只猴子;或“螳螂”(Mantis),一种以螳螂为模型的六肢机器人。目前,代号为“Coyote III”的机器人正在人造月球景观中工作,这是一台灰橙色的探测车,配备独特的星形轮子和扁平车身轮廓。
智能和自动机器人对于宇宙航行来说是不可或缺的,因为它们不需要食物和氧气。此外,它们不需要在任务结束后飞回地球。但是,这些机器人必须能够、或者至少部分地能够在陌生的卫星和行星上独立工作。至于它们能够取得多大的成功,这可以在位于不来梅的塑料陨石坑中得到证明。这个塑料陨石坑是由一家主要生产用于室内攀登的攀岩墙的公司建造的。“陨石坑的原型是阿波罗宇航员所拍摄的照片中位于月球南极的一个陨石坑。”世界领先的自动宇宙和水下机器人专家克辛那教授解释说。

人造陨石坑中的相遇:弗兰克·克辛那教授与步行机器人“查理”
为木星卫星研发的自主行驶潜艇
太空与海底世界所拥有的共同之处要比人们可以想象的多得多。太阳系中最有趣的地方之一是木星卫星欧罗巴,在其冰层下面怀疑存在巨大的液态水海洋——也就是可能形成生命的地方。为此,来自不来梅的机器人专家们还建造了一个 8米深的水箱,他们可以在其中测试“欧罗巴探测者”(Europa Explorer)机器人:名为“Teredo”的管状钻头将穿透这颗卫星上3至15公里厚的冰层,然后放出代号为“Leng”的水下机器人以进行海洋研究。由于控制信号从地球传输至欧罗巴卫星需要 33 到 53 分钟,因此,这艘鱼雷形的潜艇必须能够自主运行。
毫无疑问,来自“太空城市”不来梅的研究小组多年来一直致力于传感器技术、传动机构和人工智能等主题。他们的研究成果不仅有利于发展宇宙航行——克辛那教授认为与其他领域互通有无同样非常重要,例如对于那些在地球上的危险环境中必须能自主运动的机器人。克辛那教授还兴致勃勃地关注自动驾驶的发展,他自然对此有着特别的看法。“对我来说,自动驾驶汽车是一个我可以驾驶的机器人。”克辛那教授说。
实际上,这两者之间确实有许多共同之处。自动驾驶汽车和位于遥远星球上的机器人都必须探测和分析所处的周围环境,并利用这些信息独立做出明智的决定。当然,月球和火星上没有交通信号灯、交通指示牌或者会突然出现汽车或行人的道路——但克辛那教授的机器人必须能够应对其他突发情况,例如火星上的沙尘暴和龙卷风,或者月球上剧烈改变的光照条件等。
1920
年
1939
年
1942
年
无需地图即可定位
与自动驾驶汽车相比,机器人在执行任务期间无需借助任何地形图。“精确到一米的卫星图像分辨率仍然太差。”克辛那教授解释道,“这就是机器人需要针对周围环境建立起自己的地图,并在其中定位自己的位置的原因。”为此,科学家们开发出了自定位与映射算法(Self Localization and Mapping,SLAM),这是一种用于在未知地形中定位的概率方法。“这一切都始于下水道导航。”克辛那教授回忆道,“下水道是一个很简单的环境,因此我们能够非常好地测试这个新方法。”从20 世纪 90 年代中期开始,自定位与映射算法同样被用于开放地形和建筑物中。约 15 年前,自动行驶汽车的自行定位功能首次投入使用。

32机器人AILA具备运动自由度,每条臂拥有七个关节,可充当移动操控领域的研究平台。

6以螳螂为原型的机器人 MANTIS 拥有六肢。
机器人 Sherpa 是配备自动行驶机构的漫游机器人,它可灵活适应不同的地形和障碍状况。
自动驾驶汽车应在使用阶段继续学习
自定位与映射算法的基础是在动态情形下的目标识别,机器人专家们很早便已开始推动这项技术的发展。其中的挑战在于:即使摄像机发生移动、环境条件因天气和光线改变而变化,这项技术都必须可靠且正常地运转——无论是在火星上还是在地球上都不例外。“在机器人技术中,目标识别已十分成熟且稳定。”克辛那教授说道。“其中运用的数学知识与如今在汽车中所运用的一样。”然而这种技术转移并不是一条单行道:近年来,机器人开发者从智能手机热潮中获益匪浅,智能手机为他们带来了廉价的摄像机。随着微处理器的性能持续呈指数增长——这被称为摩尔定律并同时受到汽车行业的推动——研究人员开发出的机器人变得越来越智能化。
根据自己的研究,克辛那教授知道要求一辆汽车在没有人为操控的情况下顺利行驶是多么苛刻。但克辛那教授已经尝试乘坐了两辆测试车,并表示“非常震撼”。作为对技术发展充满激情的一名观察者,克辛那教授对这一主题也有自己的想法。“自动驾驶汽车应该在投入使用的阶段进行自主学习。”他建议说,“人们购买的车辆本身具有基本经验,它在行驶过程中与其他车辆一起继续学习发展。”那将是一次集体学习,就像现在进入工业生产的协作机器人一样:这些车辆必须适应许多不同的使用者,并与使用者彼此分享他们的个人经历,例如通过云。
“对我来说,自动驾驶汽车是一个我可以驾驶的机器人。”
弗兰克·克辛那教授(Prof. Frank Kirchner)是自动化太空和水下机器人领域的世界一流专家之一。他是德国人工智能研究中心(DFKI)不来梅分部的发言人,并担任拥有 100 多名员工的机器人创新中心的研究领域负责人。
“如今我们可以看到,自动驾驶过于依赖单一算法——但我们早已对这些算法了如指掌,其中一部分算法甚至要追溯至 20 世纪 50 年代。”克辛那教授说道,“更重要的是对知识进行组织。关键是要将知识的各个组成部分彼此联系起来——例如通过集体学习。车辆自身必须是一个终身持续学习系统。”对此应当持续提出各种构想:克辛那教授的团队正在研究“Dreams4Cars”这一欧盟项目,旨在提高自动驾驶汽车的安全性。与内在图像或构想中提出的内容相似,控制软件应该能够在模拟环境中不断播放真实的交通状况,从而测试车辆的不同反应,以便它能够独自应对特殊事件。来自不来梅的机器人专家们在找寻未来月球到地球的道路时会有哪些奇思妙想,这一切令人充满期待。
信息
本文首次发表于《保时捷工程杂志》2019年第1期。
作者:Christian Buck
摄影:Cosima Hanebeck; DFKI
版权:本文中发布的所有图片、视频和音频文件均版权保护。未经保时捷工程书面许可,不得部分或全部复制。欲了解更多信息,请联系我们。
联系方式
您有问题或想了解更多信息吗?请联系我们:info@porsche-engineering.de