
保时捷扭矩控制让电动SUV获得极致抓地力
轻车熟路 雪中飞舞
可独立驱动各个车轮的电动车实现了驱动力可调节的分布式驱动,让车辆即使在极端条件下也可保持稳定行驶,而这一切的前提是扭矩控制系统能准确识别异常状况并立即作出反应。保时捷工程集团专门为此研发出一套适用于电动 SUV 的解决方案并完成了相应的测试。无需额外的传感器,仅由软件控制。
让所有驾驶者心惊胆战的一种路况是,在一条积雪覆盖的道路上,前方突然出现一个急弯,几乎没有任何时间刹车减速。一般的车辆在遇到这种情况时很难躲过车辆打滑的危险。车尾向一侧甩出,整个车身不受控制地打转,最终陷落到路旁的沟渠中。但在这次测试中,结果却完全不同。驾驶员正常地转向,SUV 轻松进入弯道,甚至没有任何减速。如果这时看一眼车速表,弯道速度高达 80 km/h,很明显普通汽车绝对做不到这一点。这辆在冬季环境下测试的 SUV 是一辆四驱电动汽车,每个车轮一台电机。
在此之前,这种驱动技术仅用于火星探测器上;如今,它终于走入了日常生活,这要归功于保时捷工程集团为量产电动 SUV 研发的扭矩控制系统。这是一项真正意义上的开创性工作。“许多地方都必须完全从零开始,”保时捷工程集团功能研发团队主管马丁·雷扎克博士(Dr. Martin Rezac)说。这还不是唯一的挑战:研发人员只能通过软件来优化车辆的驾驶性能,不允许加装任何额外的传感器,必须使用现有控制设备。也就是说,研发人员必须通过应用程序来优化驾驶稳定性。
纯电子控制扭矩
与汽油和柴油车相比,配备多台电机的四驱电动汽车具有极大的优势,其前后桥以及四个车轮都配备独立的电机,因此驱动力可以极为灵活地进行分配。保时捷工程服务有限公司的乌尔夫·辛泽(Ulf Hintze)解释说:“这就像是在每个车桥或每个车轮上安装一个独立的油门踏板一样。”传统的四轮驱动车辆只安装了一台发动机,需要通过中央差速器将驱动力分配到前后桥。前后桥的扭矩比通常是固定的,例如前桥三分之一,后桥三分之二。从理论上来说,这种扭矩比是可变的,但需要额外的机械装置(摩擦多片式离合器),而且反应比较迟缓。而电动汽车的扭矩可实现纯电子控制,这种控制方式的响应速度要比机械离合器快得多。智能软件只需几毫秒就能完成驱动力的分配,使车辆始终保持稳定行驶。
保时捷工程集团所研发的就是这种用于四轮驱动的纯电动 SUV 的扭矩控制系统。该软件可用于不同的车体结构和电机排列方式,当然也适用于其他车型的电动汽车。保时捷工程师们首先研发出了驱动力的基本分配系统,即用于控制前桥和后桥驱动力分配比例的软件。在车辆直线行驶并且车身重量分布均匀的情况下,分配比可控制在 50/50。当驾驶员加速时,软件会切换到全后轮驱动,或者在急弯时切换到全前轮驱动。“即使坐在副驾驶位置,也能感觉到车辆明显更加稳定,”功能研发人员雷扎克说。由于这种性能优化是纯电子控制的,理论上甚至可以为驾驶员提供更多配置,例如一种快速的跑车冲刺模式,或是一种舒缓的巡航模式。

“可以明显感觉到车辆 更加稳定。”
马丁·雷扎克博士
保时捷工程集团
该控制软件的第二项任务是让扭矩与车轮速度相匹配。在这方面,该软件的算法遵循着一个很简单的原则——所有车轮的旋转速度应当尽可能一致。在干燥的高速公路路面上很容易实现这一目标,但在积雪的山路上就要困难很多。例如,当前轮接触到冰面时,在没有电子控制干预的情况下,前轮可能会打滑。但扭矩控制系统会立刻识别到这种异常情况,并在几分之一秒的时间内改变打滑车轮的扭矩,使其更慢地旋转以保持抓地力。在传统内燃发动机车辆中也有类似的技术,即转速感应式限滑差速器,也被称为“Visko Lok”。该组件通过齿轮和液压装置来确保车轮都不会比其他车轮旋转得更快。但机械装置的响应速度总会比较迟缓。在电动 SUV 中,控制软件承担了差速器的作用,而且响应速度更快,也完全不会磨损。
扭矩控制系统的第三个功能,也可能是最重要的功能,是对汽车横向动力的控制,即避免车辆出现危急情况。正如本文开篇所描述的情景:湿滑的路面、狭窄的弯道、极高的车速。没有扭矩控制系统的车辆很容易陷入转向不足、操纵不灵的险境。也就是说,尽管驾驶员猛打方向盘,但车辆却继续以丝毫未减的速度直线向前滑行。而电动SUV的控制软件却可以立即避免这种转向不足的情况。在左转弯时,软件会控制左后轮减速,同时让右后轮加速,直到车辆回到稳定的行驶状态。同样,当出现转向过度(车尾侧向甩出)时,系统也会采取类似的措施。在扭矩控制发挥作用时,驾驶员甚至完全感觉不到这些微妙而又快速的活动。对于该系统的效果,辛泽总结说:“感觉就像是在轨道上行驶,SUV开起来就像跑车一样敏捷。”
动力的精确分配
在任何情况下,无论行车方向如何,车轮只能传输一定大小的动力。这意味着,车轮上加载的驱动力或制动力越大,可传输的侧向力就越小。电子扭矩控制系统正是利用了这一原理,例如系统可以降低车轮的驱动力,从而使车辆保持所需的行驶方向。
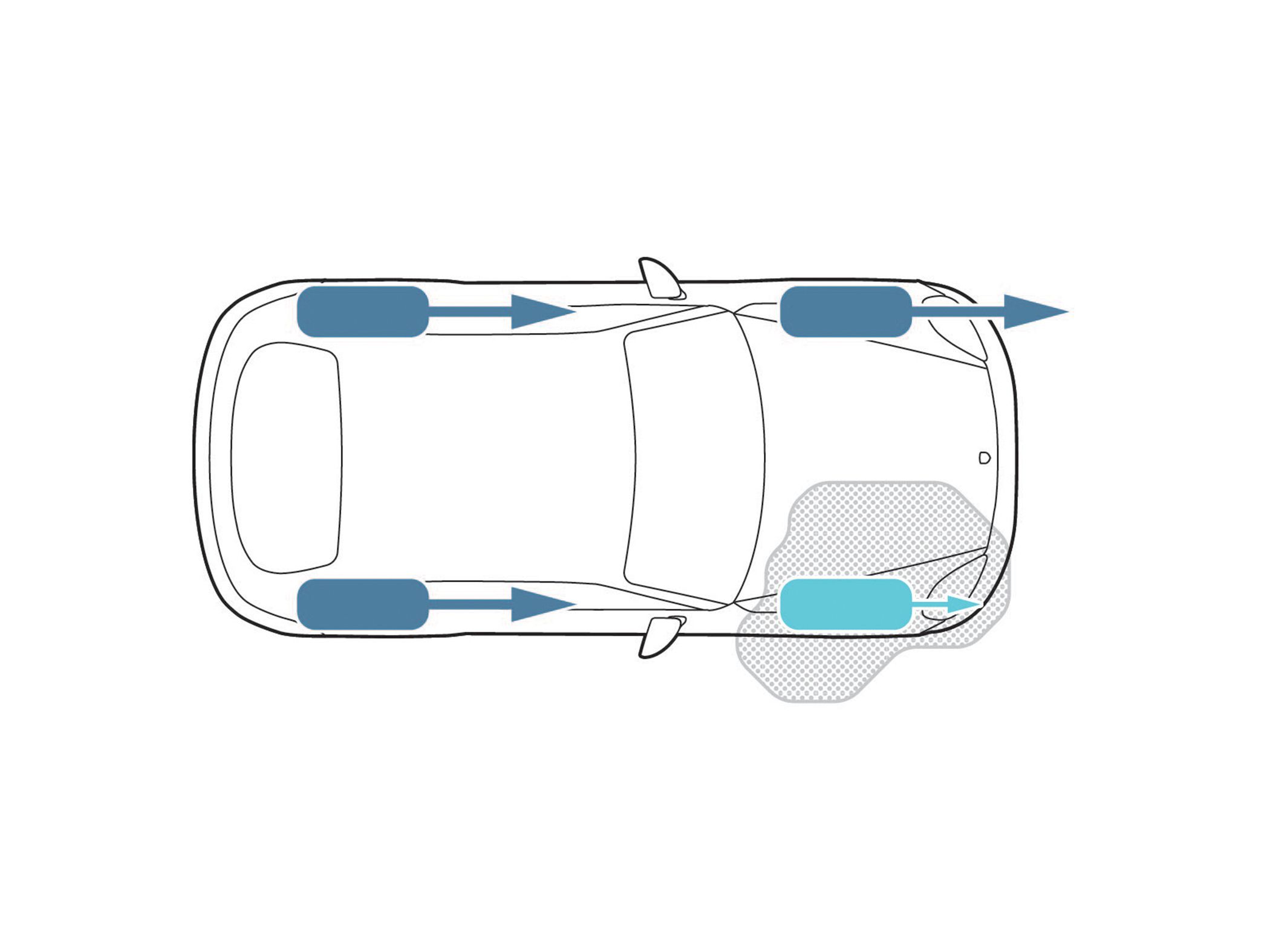
情境1:驾驶员希望全力加速,但右前轮的摩擦力较小(例如路面积水或结冰),因此车身开始打滑。这时系统可将驱动扭矩分配到另一1 侧的后方(深色箭头)。
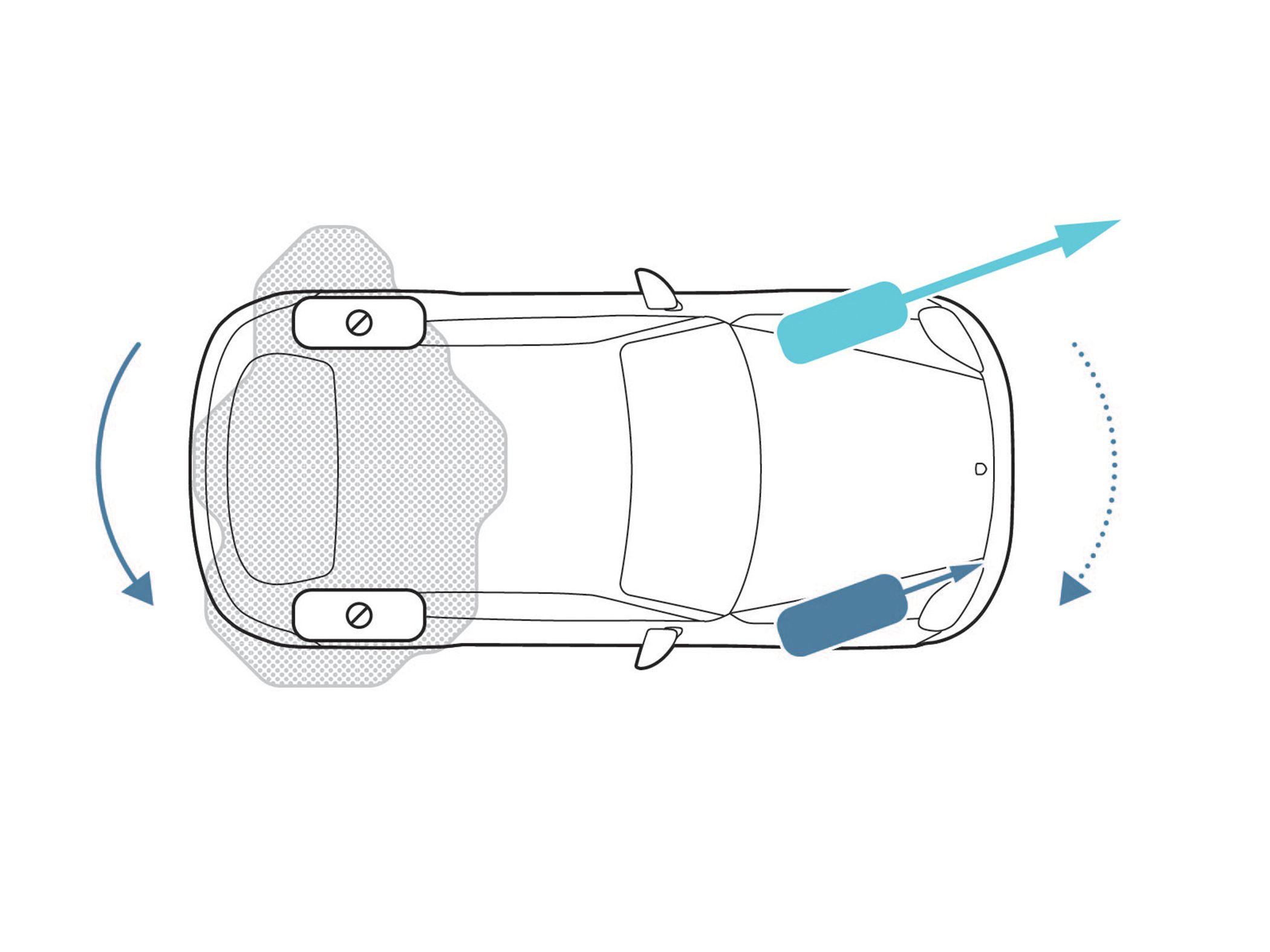
情境2:车辆进入左转弯道。后轮行驶在光滑路面上,因此车辆的尾部开始打滑(实线箭头)。软件完全取消后轮的驱动扭矩,以减缓后轮打滑的程度。此外,软件将大量扭矩分配至左前轮,从而产生与车辆打滑相抵消的扭转力。
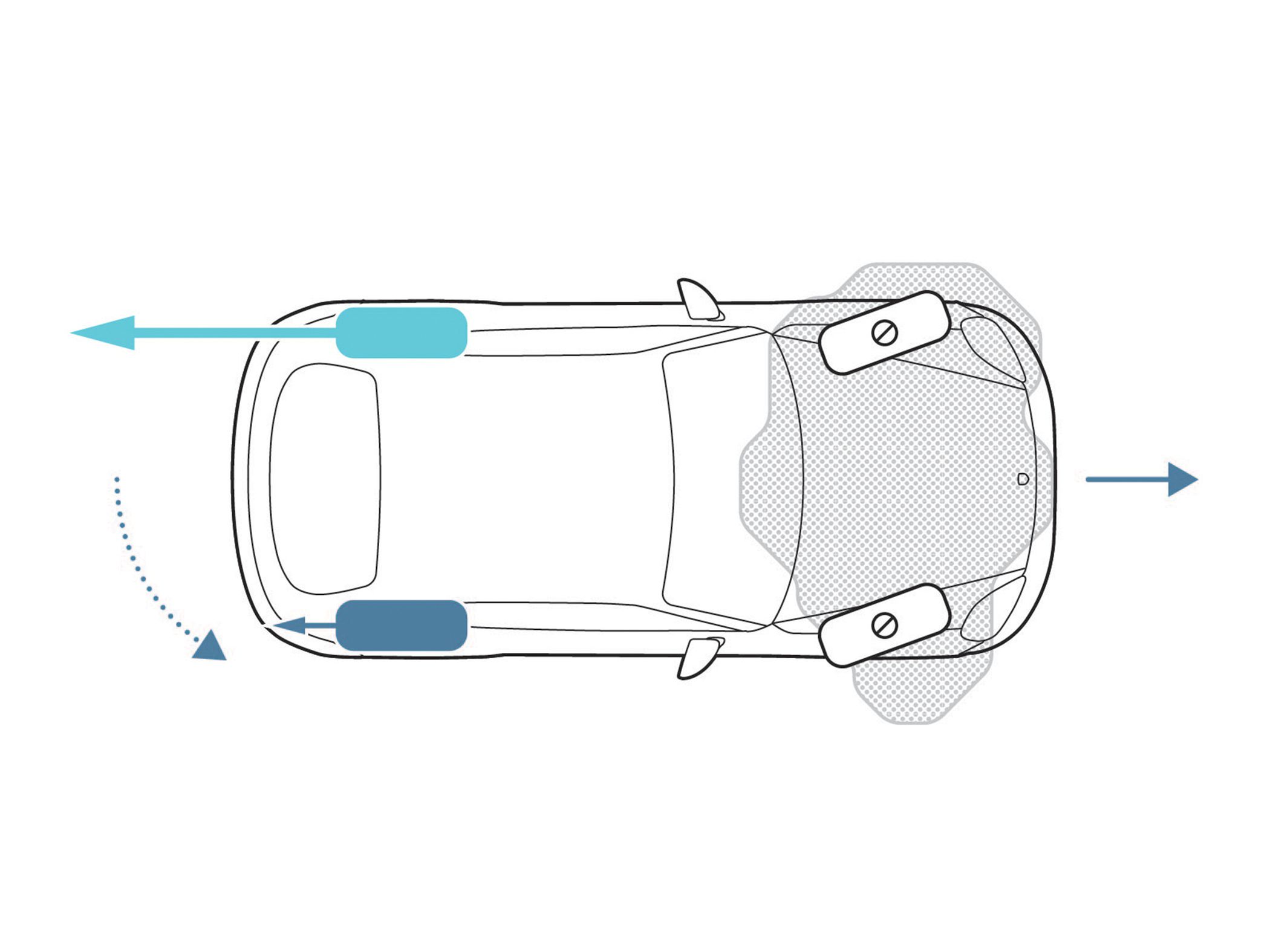
情境3:驾驶员想要驶入左转弯道,但前轮发生打滑,汽车保持直线行驶(前方箭头)。软件降低前轮的驱动力,并将大量扭矩分配至左后轮,以产生进入左转弯道的扭转力(虚线箭头)。
观察者模块时刻守望
行驶状态检测器(研发人员称其为“观察者”)是控制软件作出所有干预决策的基础。这个软件模块时刻监控着多项因素——方向盘转向的角度、驾驶员踩踏油门的力度以及车辆围绕垂直轴旋转的程度。这些数据均由一个偏航传感器提供。观察者将当前的实际行驶状态与车辆的动态模型进行比较,该动态模型代表了车辆在正常条件下的目标状态。如果观察者检测到偏差,例如转向不足或转向过度,则控制软件将进行干预。例如,当车辆进入弯道的角度并不符合当前方向盘的转角和车速,则系统将有选择性地对单个车轮减速,直到车辆回到正确的行进方向。
虽然传统的驾驶稳定程序(ESP)也能够达到此目的,但四驱电动汽车的安全系统的功能明显更强。传统的 ESP 系统只能够减速,而四驱电动汽车却可以对单个车轮加速,这样,车辆就像是被“拉回”到正确的方向,并且车速也不会有丝毫降低。此外,与 ESP 系统的液压控制相比,四驱电动汽车的控制方式更加柔和,再也没有防抱死系统让人熟悉的颠簸跌撞感。
雷扎克表示:“车辆状态观察者的研发是最艰难的挑战。”这耗费了研发人员大量精力,其根本原因只有一个:汽车对自身的状况知之甚少。它不能确切地知道自己的速度,只能通过车轮旋转来推断,但这在冰雪路面上尤其困难。因此,观察者必须利用纵向和横向加速度等额外的信息来估计车辆的速度。此外,车身重量分布的信息同样模糊不清。虽然车辆悬架能够检测每个车轮上的负荷,但这些数据也不具有确定性,最多只能用作参考。例如,当减震器察觉后桥重量增加,其原因可能是车辆停在了斜坡上,也可能只不过是后备箱装的东西太多。

“这就像是在每个车桥或 每个车轮上安装一个独 立的油门踏板一样。”
乌尔夫·辛泽
保时捷工程集团
我们能获得的车辆数据十分贫乏。更困难的是,根据客户的要求,车辆上不允许安装额外的传感器,因此 SUV 项目对软件研发人员的创造力提出了极大的考验。“观察者必须能够估计出车辆的重要参数,”雷扎克解释说。为此,研发人员利用了不同寻常的数据源。例如,扭矩控制系统的一个传感器可检测车辆的倾斜角度,而该传感器本身的作用是用来自动调节车前灯的角度。
研发人员不仅需要研制出整个软件包,还要通过实地试驾进行校准。另外,这个项目的时间也并不充裕,只有两个冬天可供他们在一条冰冻的河流上进行试驾。保时捷工程师们在测试中发现,虽然电动汽车的电机具有响应时间短这一巨大优势,但有时也会产生不良的副作用。“电机控制速度如此之快,以致于可能产生振动,”与团队一起参与试驾的辛泽说。在某些情况下,软件在极短时间内多次切换车辆前后桥之间的扭矩比例,从而导致电机转速明显提高。经过校准团队和马丁·雷扎克领导的研发团队的密切合作,工程师们很快发现可以通过调整控制软件的方式来解决这一问题。
这种项目的最大挑战正体现在这些细节工作中。由于该控制软件将用于量产车,因此研发人员必须对所有可能出现的情况进行测试,无论看起来有多么不可思议。例如,如果传感器报告的数据存在错误,扭矩控制系统必须决定是在忽视该数据源的情况下继续运行,还是必须关闭。
电动驱动技术的局限性是电动四驱汽车面临的另一个障碍。例如,单台电机可能无法完全转换动力电池输出的功率。研发人员也必须将此类限制考虑在内。“在此情况下,系统的控制范围将相应缩小,”辛泽解释说。每个车桥上不再有100% 的扭矩可供使用,而是只有 60%。这也是扭矩控制系统必须考虑的因素。尽管如此,该项目的所有参与者都确信:这项开创性的工作是值得的,因为未来搭载四台电机的电动车将成为一种常态。而且如果汽车能够轻车熟路般在雪中飞舞,他们的工作必将赢得众多驾驶者的认可。
三项功能确保行驶稳定性和安全性:
左转弯道试驾记录
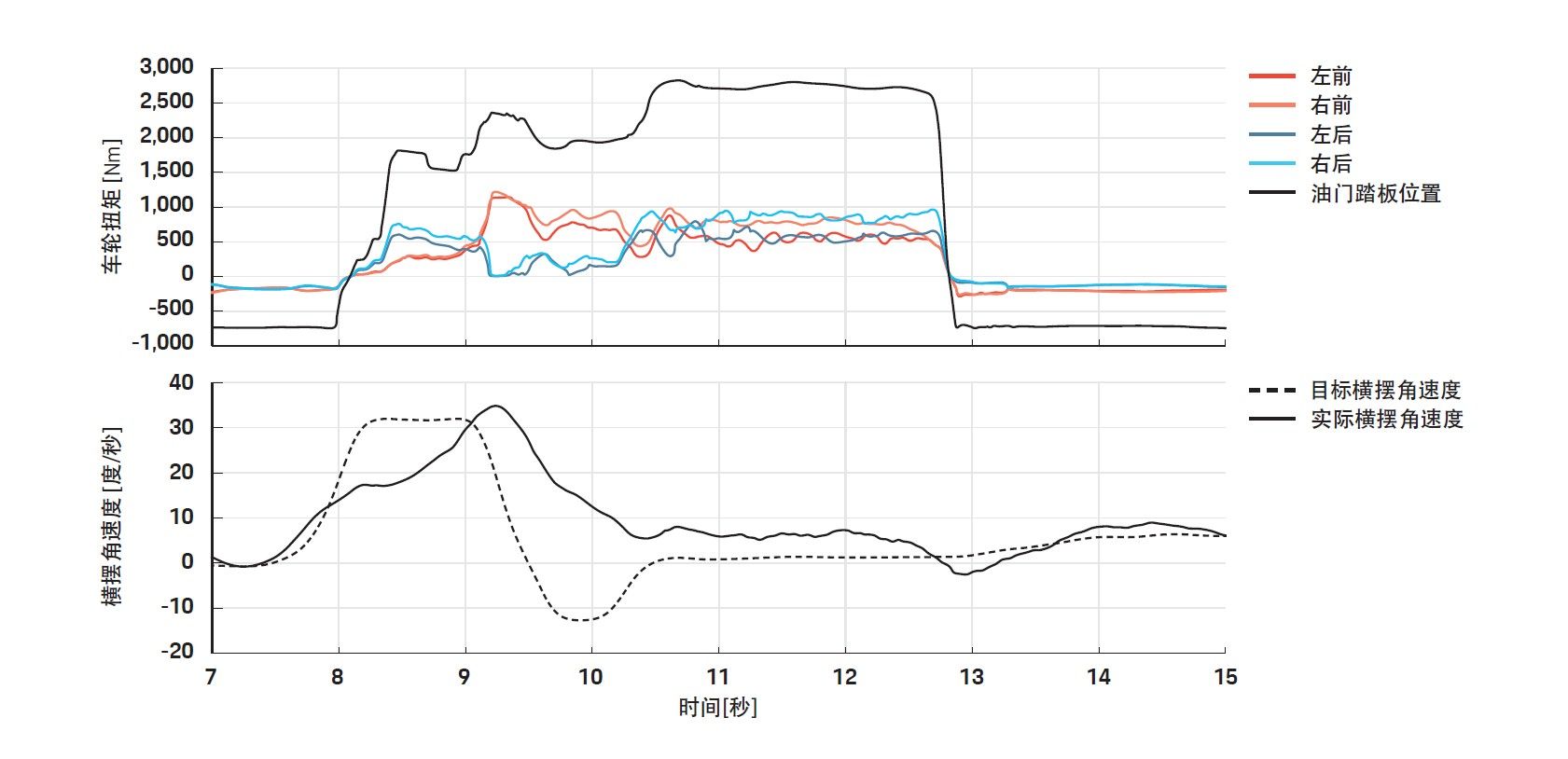
横摆角速度曲线图展示了车辆在弯道中开始围绕其轴旋转的时间点。图 2 中的两条曲线分别代表驾驶员所期望的横摆角速度(虚线)和测得的横摆角速度(实线)。图 1 中的四条曲线(红色、橙色、深蓝色、浅蓝色)显示了四个车轮的驱动扭矩,其上方的黑色曲线是油门踏板的位置。可以看出,车辆首先处于转向不足的状态。大约 9 秒钟后,后桥打滑,车辆开始偏离方向。从 10.5 秒开始,车辆趋于稳定,进入适度的转向不足行驶状态。驱动扭矩主要分布在右侧的两个车轮。
综述
保时捷工程集团为四轮驱动的电动 SUV 研发出一套扭矩控制系统,可在各类情况下使稳定性和安全性达到最佳状态,并且无需安装额外的传感器。该系统只需几毫秒就能在四个车轮之间优化分配驱动力,从而使车辆稳定行驶。保时捷工程集团不仅研发出了相关软件,而且在仅有的两个冬天里通过实地试驾对其进行了校准。该软件适用于各种车体结构和电机排列方式。
信息
本文首次发表于《保时捷工程杂志》2019年第1期。
文字:Constantin Gillies
摄影:Tobias Habermann
版权:本文中发布的所有图片、视频和音频文件均版权保护。未经保时捷工程书面许可,不得部分或全部复制。欲了解更多信息,请联系我们。
联系方式
您有问题或想了解更多信息吗?请联系我们:info@porsche-engineering.de